Lors d’une traversée de l’Atlantique Nord le 27 janvier dernier, entre Le Havre et Newark, et alors qu’il faisait route au 218o, le porte-conteneurs britannique P & O-Nedlloyd-Genoa de 2 900 EVP, 210 m de long, rencontre du mauvais temps: vent de SE de 6 à 10, mer agitée à forte, avec des creux de 5 à 6 m de secteur sud, venant de 30 à 40o par bâbord avant, houle de 200 m, tangage et roulis, rappelle le rapport de la Maritime Accident Investigation Branch (MAIB), diffusé en août dernier.
Craignant les effets d’un roulis paramétrique à résonance, susceptible de provoquer cinq à six coups de roulis de l’ordre de 30o avec rappels brutaux, le commandant vient au 180o et réduit progressivement la vitesse de 21 nœuds (maximum 23,5 nœuds) à 5 nœuds, de manière à avoir la mer de l’avant tout en limitant le tangage. Par ailleurs, il fait ballaster de manière à augmenter le GM (distance métacentrique) de 0,77 à 1,13 m (maximum 1,315 m), pour réduire l’angle de roulis; le navire étant sous gouverne manuelle.
Le vent continue de fraîchir, à prés de 70 nœuds, et la mer à grossir avec des vagues plus hautes que la moyenne, de l’ordre de 10 à 12 m venant alors par 30o bâbord (150). Le navire subit alors cinq coups de roulis de 25 à 30o. Le commandant fait aussitôt gouverner au 150o. Le navire se redresse brutalement, tout en revenant de lui-même au 180o, provoquant l’effondrement d’une pile de conteneurs sur l’avant bâbord du château, 27 conteneurs de 40’ tombant à la mer, 28 de 40’ demeurant écroulés sur le navire, et 9 seulement restant saisis sur le pont.
Le rapport de la MAIB note que:
– le commandant avait une bonne expérience de ce type de navire;
– l’équipage de 22 hommes paraissait suffisant en nombre et en qualité et ne présentait pas de symptôme de fatigue;
– le navire bénéficiait d’un routage météo;
– le saisissage des conteneurs en pontée avait été vérifié;
– les consignes relatives à la conduite à tenir, notamment par mauvais temps, semblaient claires.
DES CAUSES INCERTAINES
Évoquant les causes de l’accident, le rapport de la MAIB commence par expliquer qu’elles ne pourront être connues avec certitude pour deux raisons principales:
– l’absence d’informations précises quant aux accélérations subies par le navire du fait du tangage et du roulis;
– et la méconnaissance exacte des avaries subies par les moyens de saisissage et les conteneurs disparus.
Dès lors, on ne peut analyser que les éléments connus ayant concouru ou ayant pu concourir à l’événement.
Le plan de chargement: établi par les services à terre, mais devant être approuvé par le bord, il aurait fait apparaître que, contrairement aux règles, logiques, des conteneurs lourds auraient été placés sur de plus légers, et notamment sur des conteneurs frigorifiques, pour des raisons, également logiques, de branchement.
Le calculateur de chargement du bord: s’il peut, en temps réel, calculer les poids embarqués et en déduire la situation de la stabilité, il ne peut pas "signaler" un conteneur trop lourd placé au-dessus d’un plus léger, pas plus qu’évaluer les efforts auxquels pourront être soumis les moyens de saisissage.
Le saisissage: s’il est apparu que les twist-locks semi-automatiques étaient dans un état satisfaisant, il ne semble pas qu’il en ait été de même de l’ensemble des autres moyens de saisissage dont l’usage était plus ou moins approprié. Par ailleurs, ces équipements sont testés pour des angles de roulis inférieurs à 30o.
Enfin, le saisissage est rendu difficile par un manque de place, le mauvais état de certains points de fixation et le temps.
Les conteneurs: s’ils doivent répondre aux prescriptions de la Convention sur la sécurité des conteneurs (CSC) en matière de construction, d’essais, d’inspections, il s’avère qu’il y en a tellement que l’on peut trouver des conteneurs sous-normes. Il n’est pas impossible qu’un tel conteneur, de plus de cinq ans, de surcroît, ait pu participer à l’accident, tout comme d’autres trouvés en "surcharge" de quelque 6 t; ce qui est contrôlé pour le transport terrestre, mais pas pour le maritime.
Le roulis paramétrique: cette question est traitée, de façon théorique et générale dans un manuel de résistance des matériaux de V. Feodossiev, qui consacre un paragraphe à la "résonance paramétrique et [l’] auto oscillation". Il y est expliqué que l’application à un système oscillant d’une force perturbatrice harmonique doit être le double des oscillations propres pour que le système entre en résonance paramétrique.
S’agissant des porte-conteneurs, il existe une note de l’American Bureau of Shipping (ABS) de 2004, sur l’évaluation du phénomène de "parametric roll resonance" (amplification dynamique des mouvements de roulis due à la modification périodique de la stabilité du navire), susceptible de provoquer des coups de roulis excessifs sur ce type de navire. Ce phénomène tient aux modifications périodiques de la stabilité transversale quand le navire se déplace face à la mer et à une certaine vitesse, et, de surcroît, lorsque la fréquence des vagues correspond environ au double de la fréquence du roulis normal.
Ces modifications de stabilité se conçoivent aisément pour un porte-conteneurs aux formes effilées à l’avant (sous d’importants dévers) et plates à l’arrière, et dont la longueur est voisine de la période des vagues venant de l’avant.
Deux positions sont plus à prendre en considération:
– l’avant et l’arrière sur la crête des vagues avec un GM minimum;
– le maître couple sur la crête d’une vague avec un GM maximum.
Les variations de GM étant de l’ordre de 1 à 10 pour un cas étudié dans la note de l’ABS, du fait des variations des surfaces de carènes, avec des conséquences évidemment similaires pour les courbes de réserve de stabilité (GZ).
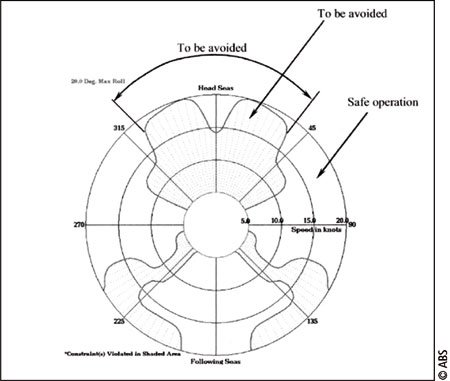
Quant à l’amplitude du roulis paramétrique, dans le même cas, elle atteint ou dépasse les 30o pour des vitesses de 10 à 25 nœuds.
La mise sous forme de diagramme polaire (voir schéma) de ces résultats, en fonction du chargement et de l’état de mer, est, on ne peut plus explicite, indiquant les routes à éviter, dont, généralement, celles comprises dans un secteur de 30o de chaque côté de la direction d’où vient la mer.
Enfin, cette note indique que l’utilisation de stabilisateurs du type passif (et non actif, inefficaces à faible vitesse, et consommateurs d’énergie) était sans doute l’un des meilleurs moyens de contrer l’effet du « roulis paramétrique ».
En ce qui concerne l’accident du P & O Nedlloyd-Genoa, outre les changements de routes et réductions de vitesse déjà indiqués, le commandant a fait ballaster, le GM passant alors de 0,77 m à 1,13 m. Cette opération aurait entraîné une réduction de la période de roulis de 28,5 s à 24 secondes, donc de l’amplitude dudit roulis, la rapprochant ainsi de deux fois la période des vagues et accroissant de facto le risque de roulis paramétrique, note le MAIB
En bref, pour éviter d’entrer dans un système de roulis paramétrique pour lequel les conditions n’étaient pas réunies, le commandant aurait, par erreur, créé ces conditions.
Une vague anormale
Si vague anormale il y a eu, en dépit de la relative rareté du phénomène, il semble que l’on puisse admettre qu’elle ait accéléré le redressement du navire, déjà amplifié par le ballastage et que les accélérations, combinées à la répartition pondérale des conteneurs aient pu entraîner la déstructuration de l’un d’eux et, partant, l’écroulement de la pile.
CE QUI A ÉTÉ FAIT…
La MAIB note qu’un certain nombre de mesures ont déjà été prises, en ce qui concerne:
– la mise en service de calculateurs, à bord comme à terre, pour mieux contrôler les chargements du point de vue de la répartition des poids, de la stabilité et de la résistance du saisissage;
– une étude relative au saisissage, en liaison avec les sociétés de classification certificatrices. Cette étude portera également sur l’usage ou non des twist-locks automatiques et semi-automatiques;
– l’amélioration du contrôle des conteneurs, notamment dans les compagnies habilitées à effectuer leur « contrôle continu »;
– l’amélioration des connaissances ayant trait au roulis paramétrique.
Si ces mesures répondent à la plupart des points évoqués précédemment, il semble nécessaire au MAIB de revenir sur certaines.
…CE QU’IL RESTE À FAIRE
La MAIB aurait pu compléter sans peine la liste des thèmes de recherche à mener assez rapidement.
Le saisissage: à base de "saisines", il ne concerne que les trois premières piles de conteneurs en abord, transversalement. L’étude des twist-locks, évoquée par ailleurs, devrait y être jointe, puisqu’elle concerne le saisissage des plans supérieurs, et trancher clairement vers un seul système, standardisé bien sûr, qu’il soit automatique ou semi-automatique.
Le roulis paramétrique: compte tenu de l’importance de ce phénomène, qui ne concerne pas que la perte de pontée, mais aussi la stabilité transversale du navire, il convient:
– de l’étudier dès la conception du navire pour prendre en compte ses formes spécifiques;
– de mettre en place, à bord tous les capteurs susceptibles de participer à sa prédiction;
– d’y associer un système expert d’aide aux opérateurs pour leur proposer les meilleures solutions à adopter, s’agissant notamment des routes et vitesses;
– de compléter le tout avec des systèmes d’enregistrement et de"rejeu" nécessaires;
– de s’assurer que les connaissances relatives à ce phénomène sont bien inculquées dans les établissements d’enseignement maritime.
Les vagues anormales: il conviendrait d’étudier les améliorations à apporter aux "radars de vagues":
– non seulement dans le cadre (difficile) de la prédiction des vagues anormales, plus fréquentes qu’on ne le pense et plus fortes (la hauteur moyenne des vagues a augmenté ces dernières années notamment en Atlantique Nord);
– mais aussi dans celui de la présentation de systèmes de vagues susceptibles de créer des vagues croisées, moins hautes, mais aussi dangereuses du fait de leur très forte cambrure.
Les systèmes de surveillance de structure des navires de grandes dimensions tels les porte-conteneurs: ces dispositifs, qui existent, assistés par des systèmes experts, sont indispensables pour permettre aux opérateurs de connaître en temps réel les principaux efforts subis par la structure de leur navire, y compris ceux dus à la torsion particulièrement importante sur les PC, de manière à pouvoir adapter leur route et leur vitesse. Il ne faut pas oublier que depuis une passerelle, fermée, située à plus de 30 m au dessus de l’eau et sur la partie arrière d’un navire de plus de 300 m de long, on n’a pas du tout la même appréhension de la mer que celle que l’on pouvait avoir depuis la passerelle, ouverte, située à une quinzaine de mètres au dessus de l’eau, sur un navire qui ne faisait qu’une centaine de mètres de long…
Comme le disait si bien un ingénieur expert en la matière "autrefois les hommes souffraient avant le bateau, maintenant c’est le contraire".
Ces systèmes experts, évoqués ci-dessus, composés de capteurs et senseurs (jauges de contraintes, accéléromètres, GPS, centrales inertielles…) permettant d’évaluer le comportement du navire, de le comparer aux limites fixées pour les différents efforts subis, et d’aider les opérateurs, en leur proposant les routes, vitesses, et, en l’occurrence ballastage, de manière à respecter au mieux ces limites, devraient être rendus obligatoires sur les navires. Il s’agit là d’un problème fondamental, qui mériterait sûrement une priorité dans les "paquets réglementaires" de la Commission européenne. De tels systèmes auraient pu éviter les catastrophes de l’Erika et du Prestige.
La distance métacentrique: une donnée essentielle
Un flotteur au repos est soumis à deux forces: son poids et la poussée d’Archimède. Le premier, orienté de haut en bas s’applique au centre de gravité du navire (G); la seconde, orientée de bas en haut, au centre de gravité du volume d’eau déplacée, appelé le centre de carène (C). Quand le navire est “normalement” droit, G est au dessus de C, dans le même plan vertical. Lorsque le flotteur gîte, C se déplace du même côté et forme ainsi avec G un couple de redressement. On admettra sans démonstration que l’efficacité de ce couple est proportionnelle à la distance entre G et le métacentre, M, qui se trouve à l’intersection entre la verticale de C et le plan de symétrie du navire. GM est la distance (ou la hauteur) métacentrique. Plus G est bas et M. élevé, plus le couple de redressement est important.